




Wei Xiaoli has used the self-driving technology, Xiaomi 2 years later, late or not?

Luo Yonghao announced that he will quit all social media platforms starting tomorrow and will start his own business again. Luo Yonghao, who is known as the "industry's meditation lamp", has repeatedly fallen, but he has climbed up strongly and continued to start his own business, a spirit worthy of our admiration. Of course, we are talking about an entrepreneur today, and this is his last venture in his life, he is Lei Jun, and the Xiaomi car is his self-reported last venture in this life, and this also carries the expectations of countless people. Recently, the Xiaomi car and a series of attention-getting patents were published, combined with these patents, we can come together to see, that the Xiaomi car has progressed to which step?


From the patent can be seen, that the Xiaomi car power from more than pure electricity?
This time the patent exposure still revolves around Xiaomi's self-developed self-driving system, starting with the "automatic overtaking method, device, vehicle, storage medium, and chip". Nowadays, the decision planning algorithm is the core technology in the framework of autonomous driving technology, of which overtaking lane-changing algorithm is an important part of the decision planning algorithm, which controls the vehicle to complete automatic overtaking through the overtaking lane-changing algorithm. In the related technology, the overtaking lane change algorithm mainly judges whether to perform lane change overtaking based on the travel data such as the speed of the vehicle in front and the distance of the vehicle in front and uses the lane change acceleration gain, model. However, this judgment method does not consider the influence of vehicle type on lane change timing and lane change behavior, which makes it difficult to apply the same overtaking lane change logic to all types of vehicles, and eventually leads to a poor user experience when overtaking, or even failure to achieve lane change overtaking.
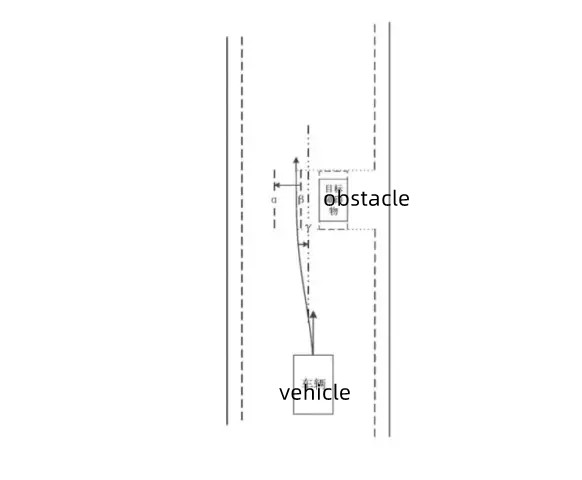

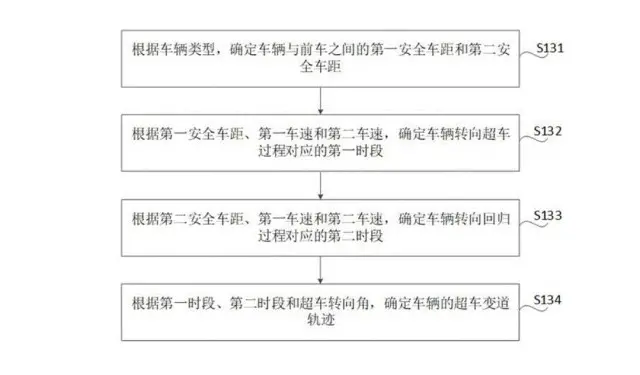
In response to the distance between the vehicle and the previous vehicle is less than the preset distance threshold, the vehicle type and the first vehicle speed of the previous vehicle are determined, and the overtaking decision result of the vehicle is determined based on the vehicle type, the first vehicle speed, the vehicle distance and the second vehicle speed of the vehicle, and in the case that the overtaking decision result is less than the preset decision threshold, the overtaking lane change trajectory of the vehicle is determined based on the vehicle type, the first vehicle speed, the vehicle distance, and the second vehicle speed, and based on the overtaking lane change trajectory, the vehicle is controlled to perform overtaking. Thereby, based on the vehicle type and relevant travel data, it is determined whether the vehicle currently performs automatic overtaking, and when it is determined through the algorithm that the vehicle needs to perform overtaking, a corresponding overtaking lane change trajectory of the vehicle is generated through the vehicle type and relevant travel data, so that the vehicle performs automatic overtaking based on this overtaking lane change trajectory. Taking the vehicle type as a necessary consideration of the algorithm enables the vehicle to accurately execute the overtaking lane change process based on the current actual situation, bringing a better automatic driving experience to passengers.
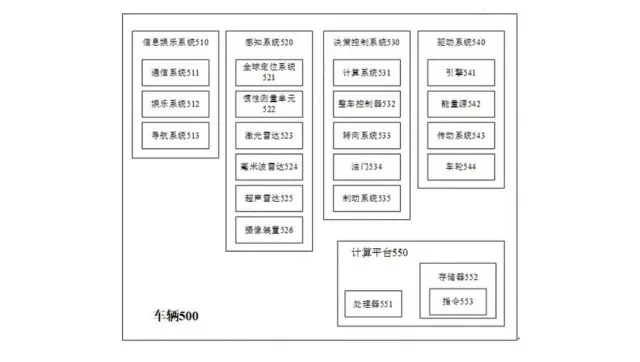
In the patent, the vehicle's self-driving sensing hardware is once again mentioned, which is through the LIDAR, millimeter-wave radar, camera and inertial measurement unit, etc. This hardware, under the coordination of the algorithm, allows the vehicle to complete the overtaking action within the preset threshold, and we also note that the "vehicle 500" mentioned in the patent is powered by an internal combustion engine that converts fuel We also note that the "vehicle 500" as stated in the patent is powered by an internal combustion engine that converts fuel into mechanical energy, which means that the Xiaomi car may be powered by fuel, augmentation, and pure electricity, but finally, the patent mentions that the vehicle 500 can be a variety of driving tools, such as cars, trucks, motorcycles, buses, boats, airplanes, helicopters, recreational vehicles, trains and so on. Of course, it is also true that Xiaomi Auto is not necessarily a pure tram, and a diversified product strategy has a strong role in enhancing the competitiveness of the brand.
In fact, like Xiaomi's automatic overtaking type of patents, Baidu Apollo, Guangzhou Automobile, Dongfeng Motor, and other companies have similar patents, but for the different threshold settings, the subtle differences in the program can also make them different from each other. At present, like Tesla's latest FSD has opened the function of automatic overtaking overseas, domestic new power Ui Xiaoli also have similar functions are being landed, automatic overtaking for L3 level autonomous driving, may not be useful, currently has been on the road L3 or mainly to follow the car, such as Mercedes-Benz. But for the future L4-L5, the automatic overtaking function is quite important.
Baidu "raise tiger into a problem"? Xiaomi car will be equipped with a Baidu high-precision map
Another patent issued by Xiaomi is about solving a difficult problem of stability and safety in the field of autonomous driving - avoiding obstacles, the patent is called "path planning method, device, storage medium, and vehicle".
The routing module of the autonomous driving system plans the road sections that the vehicle needs to pass through based on the vehicle location, the destination location, and a high-precision map. The motion planning module generates a safe and comfortable driving trajectory based on the information output from the routing module and the information provided by the sensing module, etc., and sends it to the vehicle control module. The vehicle control module controls the vehicle according to the driving trajectory. For the obstacles on the road section, especially the obstacles moving at high speed, for safety reasons, the motion planning module adopts the strategy of changing lanes or slowing down and braking to plan the driving path to avoid the collision between the vehicle and the obstacles. However, this way of obstacle avoidance leads to poor smoothness of vehicle driving. That is, there will be a sudden high-speed dodge, so that the occupants of the car unexpectedly, may lead to dangerous situations.
Previously, we mentioned in our last analysis article that Xiaomi will use high precision maps, and in this patent, Xiaomi directly indicates that it will use Baidu's high precision maps: the path planning method used by self-driving vehicles is the method provided by Baidu's Apollo EM Motion Planner. the functional architecture of Apollo includes a high-precision map module (HD Map) to Provide high-precision map information. The localization module and the perception module are used to provide the current dynamic environment around the vehicle. The prediction module is used to provide predicted future environmental information. Routing module for outputting all the road sections that the vehicle passes through on its way from the departure point to the destination based on a dedicated routing map. The motion planning module for receiving all information to generate a safe and comfortable trajectory to send to the vehicle control module.
Among them, the motion planning module for the roadway obstacles, especially high-speed dynamic obstacles, for safety reasons, the motion planning module will take the lane change driving or slow down the braking strategy to plan the driving path to avoid the vehicle collision with the obstacles. However, large movements due to large lane changes, or large movements due to rapid speed changes caused by deceleration and braking can cause the vehicle to drive very unstably. For example, the unstable movement of the vehicle is caused by sharp braking, sharp deceleration, and violent lane change. So the vehicle will detect the obstacle, with a complex function operation to determine the soft boundary of an object, and then through the vehicle's own position and subsequent detection data, after other function operation to determine the hard boundary, so as to plan the avoidance path in advance, so that avoiding obstacles becomes easier, the car driving experience better.
But what we see, this time mainly for mobile obstacles did not say it is Corolla, Hennessy, and Leyland, do not over-associate ...... But now the automatic driving for fixed stationary obstacle recognition is not enough, last time Tesla hit the plane, Azera, Xiaopeng high-speed crash fault car, are the pot of stationary objects, so also hope that more companies can the solution to stationary obstacle avoidance recognition, make more research and development.
Xiaomi's green wave passage, will be smoother?
Among Xiaomi's patents, there is another point that we talked about in the last article, about the technology of vehicle-road cooperation. In autonomous driving technology, urban area driverless is a very difficult scenario to solve. One is that due to the high cost of making high-precision maps in urban areas, the accuracy of the constructed maps is limited, and even the constructed maps only contain road-related element information without considering more relevant dynamic attributes of the road. Secondly, the traffic in urban areas is complex, and the rules of lane lines and traffic lights are variable and complicated, while there are diverse situations such as road shading and wear and tear. In this case, understanding the richer information about road elements will facilitate the landing of driverless urban scenarios. Among them, the most important is the problem of traffic lights. Although the problem of identifying and detecting traffic lights has been widely studied at this stage, there is not yet a method to automatically obtain the countdown time of each traffic light, which cannot accurately estimate the countdown status of each traffic light at urban intersections, and thus cannot meet the high-precision real-time observation of traffic status, which hinders the establishment of the urban traffic network and affects user experience.
The implementation of this patent first obtains the historical vehicle data of the intersection corresponding to the traffic light to be calculated, then determines the vehicle data of at least one target vehicle based on the historical vehicle data, then determines the stopping moment and starting moment of each target vehicle at the intersection based on the vehicle data of at least one target vehicle, and finally determines the red light duration of the traffic light based on the stopping moment and starting moment of each target vehicle at the intersection The length of the traffic light is determined based on the stopping and starting moments of each target vehicle at the intersection. Compared with the existing technology, it automatically obtains the countdown length by detecting the vehicle condition at the intersection, provides countdown attributes for each traffic light in the dynamic high precision map of the city, and then plans a reasonable speed and route, improves the accuracy of the automatic driving technology, and enhances the traffic efficiency and passenger comfort. This technology is easier for Xiaomi, which is settled in Yizhuang, to verify the implementation because Yizhuang has almost the most complete vehicle-road cooperation infrastructure in China, with vehicle-road cooperation receiving and sending devices on every traffic light, and Baidu's Apollo has been running here for a long time.
One by one, Xiaomi's self-driving patents are intensively approved and put online, which shows that Xiaomi's software development is quite fast. This time, there are also patents about lane-keeping and multi-camera module cooperation, which we will also analyze afterward.
2022 is already halfway through the year, and there are still two years to go before the new car is ready for mass production, and the recent eye-catching performance of the new forces may prompt Xiaomi to speed up again. This time we have clearly seen, that the Xiaomi car will use Baidu's high precision map technology, and Baidu's own son set degree, also and Xiaomi settled in the same Yizhuang, two more powerful new force car manufacturing enterprises, will be in the land of Beijing Yizhuang to compete.


