Вэй Сяоли использовал технологию самостоятельного вождения, Xiaomi 2 года спустя, поздно или нет?

Луо Юнхао объявил, что с завтрашнего дня он покинет все платформы социальных сетей и снова начнет свой собственный бизнес. Ло Юнхао, известный как «лампа для медитации в индустрии», неоднократно падал, но уверенно поднимался вверх и продолжал открывать свой собственный бизнес, дух, достойный нашего восхищения. Конечно, сегодня мы говорим о предпринимателе, и это его последнее предприятие в его жизни, он Лэй Цзюнь, и автомобиль Xiaomi, по его словам, является последним предприятием в этой жизни, и это также оправдывает ожидания бесчисленных людей. . Недавно были опубликованы автомобиль Xiaomi и ряд привлекающих внимание патентов, в сочетании с этими патентами мы можем собраться вместе, чтобы увидеть, на какой шаг продвинулся автомобиль Xiaomi?


Из патента видно, что мощность автомобиля Xiaomi больше, чем от чистого электричества?
На этот раз патентная экспозиция по-прежнему вращается вокруг самостоятельно разработанной системы автономного вождения Xiaomi, начиная с «метода автоматического обгона, устройства, транспортного средства, носителя данных и чипа». В настоящее время алгоритм планирования принятия решений является основной технологией в рамках технологии автономного вождения, из которых алгоритм смены полосы движения для обгона является важной частью алгоритма планирования решений, который управляет транспортным средством для завершения автоматического обгона с помощью алгоритма смены полосы движения для обгона. . В родственной технологии алгоритм смены полосы обгона в основном оценивает, следует ли выполнять обгон со сменой полосы движения, на основе данных о движении, таких как скорость транспортного средства впереди и расстояние до впереди идущего транспортного средства, и использует модель усиления ускорения при смене полосы движения. Однако этот метод оценки не учитывает влияние типа транспортного средства на время смены полосы движения и поведение при смене полосы движения, что затрудняет применение одной и той же логики смены полосы движения для всех типов транспортных средств и, в конечном итоге, приводит к ухудшению пользовательского опыта при обгоне. или даже невозможность обгона при смене полосы движения.
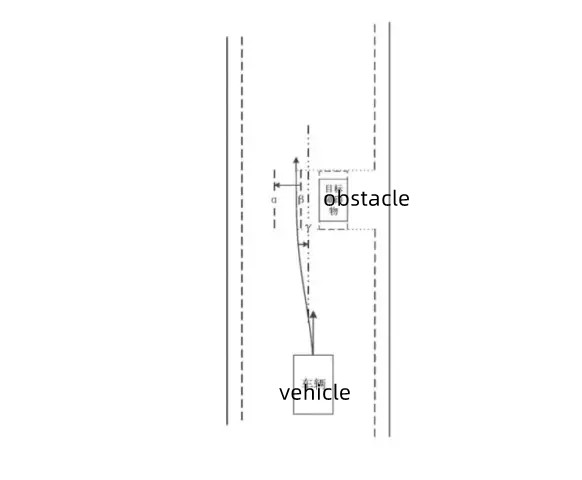

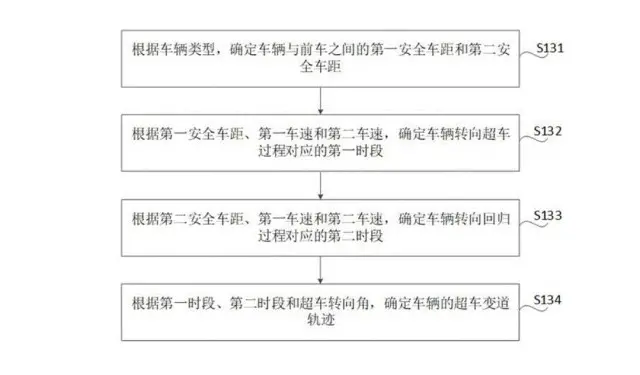
В ответ на то, что расстояние между транспортным средством и предыдущим транспортным средством меньше заданного порога расстояния, определяются тип транспортного средства и скорость первого транспортного средства предыдущего транспортного средства, а результат решения об обгоне транспортного средства определяется на основе типа транспортного средства. , первая скорость транспортного средства, расстояние транспортного средства и вторая скорость транспортного средства транспортного средства, и в случае, если результат решения об обгоне меньше, чем заданный порог принятия решения, траектория смены полосы движения транспортного средства определяется на основе типа транспортного средства , первая скорость транспортного средства, расстояние транспортного средства и вторая скорость транспортного средства, а также на основе траектории смены полосы движения при обгоне транспортное средство управляется для выполнения обгона. Таким образом, на основе типа транспортного средства и соответствующих данных о поездке определяется, выполняет ли транспортное средство в настоящее время автоматический обгон, и когда с помощью алгоритма определяется, что транспортному средству необходимо выполнить обгон, генерируется соответствующая траектория смены полосы движения транспортного средства. через тип транспортного средства и соответствующие данные о поездке, чтобы автомобиль выполнял автоматический обгон на основе этой траектории смены полосы движения для обгона. Принятие типа транспортного средства в качестве необходимого фактора алгоритма позволяет транспортному средству точно выполнять процесс смены полосы движения для обгона в зависимости от текущей реальной ситуации, обеспечивая пассажирам лучший опыт автоматического вождения.
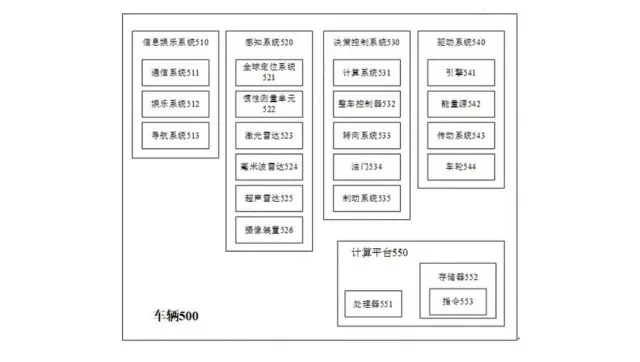
В патенте еще раз упоминается аппаратное обеспечение для самостоятельного вождения транспортного средства, которое осуществляется с помощью лидара, радара миллиметрового диапазона, камеры, инерциального измерительного блока и т. д. Это аппаратное обеспечение при координации алгоритма позволяет транспортному средству выполнять действие обгона в пределах заданного порога, и мы также отмечаем, что «транспортное средство 500», упомянутое в патенте, приводится в действие двигателем внутреннего сгорания, который преобразует топливо. Мы также отмечаем, что «транспортное средство 500», как указано в патенте, приводится в движение двигателем двигатель внутреннего сгорания, который преобразует топливо в механическую энергию, а это означает, что автомобиль Xiaomi может питаться от топлива, аугментации и чистого электричества, но, наконец, в патенте упоминается, что транспортное средство 500 может быть различными средствами вождения, такими как автомобили, грузовики, мотоциклы, автобусы, лодки, самолеты, вертолеты, транспортные средства для отдыха, поезда и так далее. Конечно, верно и то, что Xiaomi Auto не обязательно является чистым трамваем, и диверсифицированная продуктовая стратегия играет важную роль в повышении конкурентоспособности бренда.
На самом деле, как и патенты Xiaomi для автоматического обгона, Baidu Apollo, Guangzhou Automobile, Dongfeng Motor и другие компании имеют аналогичные патенты, но для разных пороговых значений тонкие различия в программе также могут отличать их друг от друга. В настоящее время, как и последний FSD Tesla, открыл функцию автоматического обгона за границей, отечественная новая мощность Ui Xiaoli также имеет аналогичные функции, автоматический обгон для автономного вождения уровня L3 может быть бесполезен, в настоящее время он находится на дороге L3 или в основном следить за автомобилем, например Mercedes-Benz. А вот для будущего L4-L5 функция автоматического обгона достаточно важна.
Baidu «превратит тигра в проблему»? Автомобиль Xiaomi будет оснащен высокоточной картой Baidu
Другой патент, выданный Xiaomi, касается решения сложной проблемы устойчивости и безопасности в области автономного вождения — обхода препятствий. Патент называется «метод планирования пути, устройство, носитель информации и транспортное средство».
Модуль маршрутизации автономной системы вождения планирует участки дороги, которые необходимо проехать транспортному средству, на основе местоположения транспортного средства, местоположения пункта назначения и высокоточной карты. Модуль планирования движения формирует безопасную и удобную траекторию движения на основе информации, выводимой модулем маршрутизации, информации, предоставленной сенсорным модулем и т. д., и отправляет ее в модуль управления транспортным средством. Модуль управления транспортным средством управляет транспортным средством в соответствии с траекторией движения. Для препятствий на участке дороги, особенно препятствий, движущихся с высокой скоростью, по соображениям безопасности модуль планирования движения использует стратегию смены полосы движения или замедления и торможения, чтобы спланировать путь движения, чтобы избежать столкновения между транспортным средством и препятствием. . Однако такой способ обхода препятствий приводит к плохой плавности хода автомобиля. То есть произойдет внезапный скоростной уклон, так что водители автомобиля неожиданно могут привести к опасным ситуациям.
Ранее в нашей последней аналитической статье мы упоминали, что Xiaomi будет использовать карты высокой точности, и в этом патенте Xiaomi прямо указывает, что она будет использовать карты высокой точности Baidu: метод планирования пути, используемый беспилотными транспортными средствами, — это метод, предоставленный Baidu. Планировщик движения Apollo EM. Функциональная архитектура Apollo включает модуль высокоточной карты (HD Map) для предоставления высокоточной картографической информации. Модуль локализации и модуль восприятия используются для предоставления текущей динамической среды вокруг транспортного средства. Модуль прогнозирования используется для предоставления прогнозируемой будущей информации об окружающей среде. Модуль маршрутизации для вывода всех участков дорог, через которые проходит транспортное средство на пути от пункта отправления до пункта назначения на основе специальной карты маршрутов. Модуль планирования движения для получения всей информации для создания безопасной и комфортной траектории для отправки в модуль управления транспортным средством.
Среди них модуль планирования движения для препятствий на проезжей части, особенно высокоскоростных динамических препятствий, по соображениям безопасности модуль планирования движения будет выполнять смену полосы движения или замедлять стратегию торможения, чтобы спланировать путь движения, чтобы избежать столкновения транспортного средства с препятствия. Тем не менее, большие движения из-за больших изменений полосы движения или большие движения из-за быстрых изменений скорости, вызванных замедлением и торможением, могут привести к тому, что автомобиль будет двигаться очень неустойчиво. Например, неустойчивое движение автомобиля вызвано резким торможением, резким замедлением и резкой сменой полосы движения. Таким образом, транспортное средство обнаружит препятствие с помощью сложной функциональной операции для определения мягкой границы объекта, а затем с помощью собственного положения транспортного средства и последующих данных обнаружения, после другой функциональной операции для определения жесткой границы, чтобы спланировать уклонение. путь заранее, так что избегать препятствий становится легче, а опыт вождения автомобиля лучше.
Но то, что мы видим, на этот раз в основном для подвижных препятствий, не сказал, что это Corolla, Hennessy и Leyland, не переассоциируйте ...... Но теперь автоматического вождения для распознавания фиксированных стационарных препятствий недостаточно, в прошлый раз Tesla врезалась в самолет, Azera, Xiaopeng, высокоскоростная авария, автомобиль, это горшок со стационарными объектами, поэтому также надеемся, что больше компаний смогут найти решение для распознавания стационарных препятствий, провести больше исследований и разработок.
Прохождение зеленой волны Xiaomi будет более плавным?
Среди патентов Xiaomi есть еще один момент, о котором мы говорили в прошлой статье, о технологии взаимодействия автомобиля и дороги. В технологии автономного вождения беспилотное управление в городских условиях представляет собой очень сложный сценарий. Во-первых, из-за высокой стоимости создания высокоточных карт городских районов точность построенных карт ограничена, и даже построенные карты содержат только информацию об элементах, связанных с дорогой, без учета более важных динамических характеристик дороги. Второй
В частности, движение в городских районах сложное, а правила разметки полос и светофоров изменчивы и сложны, в то время как существуют различные ситуации, такие как затенение дорог и износ. В этом случае понимание более подробной информации об элементах дороги облегчит посадку в городских сценариях без водителя. Среди них самой важной является проблема светофоров. Хотя проблема идентификации и обнаружения светофоров широко изучена на данном этапе, пока не существует метода автоматического получения времени обратного отсчета каждого светофора, который не может точно оценить состояние обратного отсчета каждого светофора на городских перекрестках, и таким образом, не может обеспечить высокоточное наблюдение за состоянием трафика в режиме реального времени, что препятствует созданию сети городского трафика и влияет на удобство работы пользователей.
Реализация этого патента сначала получает исторические данные о транспортном средстве на перекрестке, соответствующем светофору, который необходимо рассчитать, затем определяет данные о транспортном средстве по крайней мере одного целевого транспортного средства на основе исторических данных о транспортном средстве, затем определяет момент остановки и начальный момент каждое целевое транспортное средство на перекрестке на основе данных о транспортном средстве по крайней мере одного целевого транспортного средства и, наконец, определяет продолжительность красного света светофора на основе момента остановки и начального момента каждого целевого транспортного средства на перекрестке Длина светофора определяется на основе моментов остановки и начала движения каждого целевого транспортного средства на перекрестке. По сравнению с существующей технологией, он автоматически получает длину обратного отсчета, определяя состояние транспортного средства на перекрестке, предоставляет атрибуты обратного отсчета для каждого светофора на динамической высокоточной карте города, а затем планирует разумную скорость и маршрут, повышает точность. технологии автоматического вождения, а также повышает эффективность движения и комфорт пассажиров. Эта технология проще для Xiaomi, которая обосновалась в Ичжуане, чтобы проверить реализацию, потому что Ичжуан имеет почти самую полную инфраструктуру взаимодействия транспортных средств и дорог в Китае с устройствами приема и отправки транспортных средств и дорог на каждом светофоре, а Apollo компании Baidu имеет давно бегает сюда.
Один за другим патенты Xiaomi на беспилотные автомобили активно утверждаются и размещаются в Интернете, что показывает, что разработка программного обеспечения Xiaomi идет довольно быстро. На этот раз есть также патенты на удержание полосы движения и взаимодействие модулей с несколькими камерами, которые мы также проанализируем позже.
2022 год уже на полпути, и до того, как новый автомобиль будет готов к массовому производству, осталось еще два года, и недавние привлекательные характеристики новых сил могут побудить Xiaomi снова ускориться. На этот раз мы ясно увидели, что автомобиль Xiaomi будет использовать высокоточную картографическую технологию Baidu, а собственный сын Baidu установил степень, а также и Xiaomi, обосновавшиеся в том же Ичжуане, два более мощных новых предприятия по производству автомобилей силы, будут в стране Пекин Ичжуан, чтобы конкурировать.







