




Wei Xiaoli har brukt den selvkjørende teknologien, Xiaomi 2 år senere, sent eller ikke?

Luo Yonghao kunngjorde at han vil avslutte alle sosiale medieplattformer fra og med i morgen og vil starte sin egen virksomhet igjen. Luo Yonghao, som er kjent som "industriens meditasjonslampe", har falt gjentatte ganger, men han har klatret kraftig opp og fortsatt å starte sin egen virksomhet, en ånd som er verdig vår beundring. Selvfølgelig snakker vi om en gründer i dag, og dette er hans siste satsning i livet hans, han er Lei Jun, og Xiaomi-bilen er hans selvrapporterte siste satsning i dette livet, og dette bærer også forventningene til utallige mennesker . Nylig ble Xiaomi-bilen og en rekke oppsiktsvekkende patenter publisert, kombinert med disse patentene, kan vi komme sammen for å se at Xiaomi-bilen har kommet til hvilket trinn?


Fra patentet kan sees, at Xiaomi bilkraft fra mer enn ren elektrisitet? Denne gangen dreier patenteksponeringen fortsatt rundt Xiaomis egenutviklede selvkjørende system, og starter med "automatisk forbikjøringsmetode, enhet, kjøretøy, lagringsmedium og brikke". I dag er beslutningsplanleggingsalgoritmen kjerneteknologien innenfor rammen av teknologi for autonom kjøring, hvorav algoritmen for å skifte fil for forbikjøring er en viktig del av beslutningsplanleggingsalgoritmen, som styrer kjøretøyet til å fullføre automatisk forbikjøring gjennom algoritmen for å skifte felt for forbikjøring. . I den relaterte teknologien vurderer algoritmen for kjørefeltbytte hovedsakelig om det skal utføres filskifteforbikjøring basert på reisedata som hastigheten til kjøretøyet foran og avstanden til kjøretøyet foran, og bruker filskifteakselerasjonsforsterkningen, modell. Denne vurderingsmetoden tar imidlertid ikke hensyn til påvirkningen av kjøretøytype på tidspunktet for filskifte og filskifteatferd, noe som gjør det vanskelig å bruke samme logikk for forbikjøring av filskifte på alle typer kjøretøy, og til slutt fører til en dårlig brukeropplevelse ved forbikjøringer , eller til og med unnlatelse av å oppnå forbikjøring av filskifte.
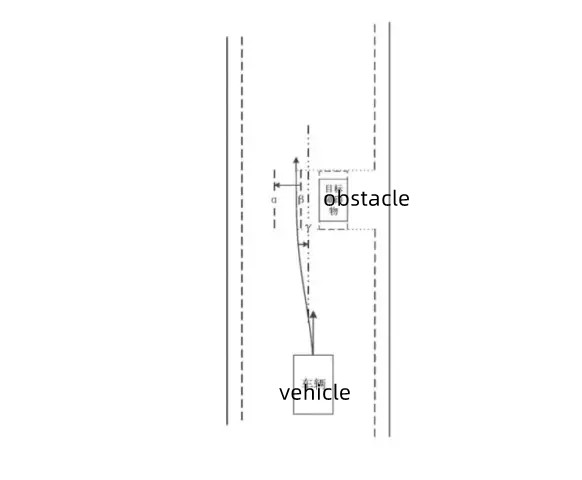

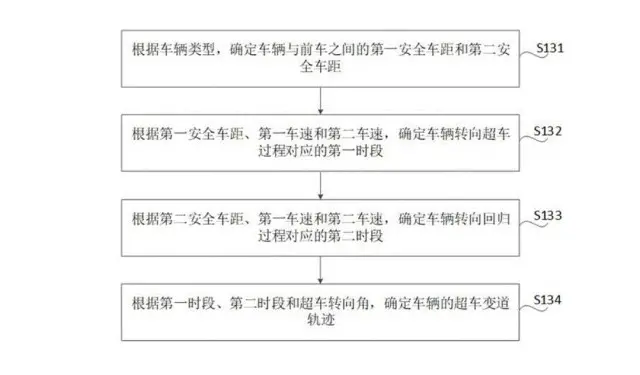
Som svar på at avstanden mellom kjøretøyet og det forrige kjøretøyet er mindre enn den forhåndsinnstilte avstandsterskelen, bestemmes kjøretøytypen og den første kjøretøyshastigheten til det forrige kjøretøyet, og resultatet av forbikjøringsbeslutningen for kjøretøyet bestemmes basert på kjøretøytypen , den første kjøretøyshastigheten, kjøretøyets avstand og den andre kjøretøyshastigheten til kjøretøyet, og i tilfelle at resultatet av forbikjøringsbeslutningen er mindre enn den forhåndsinnstilte beslutningsterskelen, bestemmes kjøretøyets bane for skifte av kjørefelt basert på kjøretøytypen , den første kjøretøyshastigheten, kjøretøyavstanden og den andre kjøretøyshastigheten, og basert på skiftebanen for forbikjøring av fil, styres kjøretøyet til å utføre forbikjøringer. Basert på kjøretøytypen og relevante reisedata bestemmes det derved om kjøretøyet for øyeblikket utfører automatisk forbikjøring, og når det gjennom algoritmen fastslås at kjøretøyet trenger å utføre forbikjøringer, genereres en tilsvarende kjørebaneskiftebane for kjøretøyet. gjennom kjøretøytypen og relevante reisedata, slik at kjøretøyet utfører automatisk forbikjøring basert på denne forbikjøringsbanen for filskifte. Ved å ta kjøretøytypen som en nødvendig vurdering av algoritmen, kan kjøretøyet utføre endringsprosessen for forbikjøring nøyaktig basert på den aktuelle faktiske situasjonen, noe som gir passasjerene en bedre automatisk kjøreopplevelse.
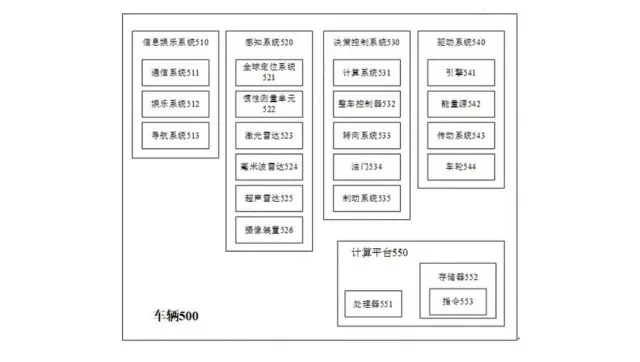
I patentet nevnes nok en gang kjøretøyets selvkjørende sansemaskinvare, som er gjennom LIDAR, millimeterbølgeradar, kamera og treghetsmåleenhet osv. Denne maskinvaren, under koordinering av algoritmen, lar kjøretøyet fullføre forbikjøringen innenfor den forhåndsinnstilte terskelen, og vi legger også merke til at "kjøretøyet 500" nevnt i patentet drives av en forbrenningsmotor som konverterer drivstoff. forbrenningsmotor som konverterer drivstoff til mekanisk energi, noe som betyr at Xiaomi-bilen kan være drevet av drivstoff, forsterkning og ren elektrisitet, men til slutt nevner patentet at kjøretøyet 500 kan være en rekke kjøreverktøy, for eksempel biler, lastebiler, motorsykler, busser, båter, fly, helikoptre, fritidskjøretøyer, tog og så videre. Selvfølgelig er det også sant at Xiaomi Auto ikke nødvendigvis er en ren trikk, og en diversifisert produktstrategi har en sterk rolle i å styrke konkurranseevnen til merkevaren.
Faktisk, som Xiaomis automatiske forbikjøringstype patenter, har Baidu Apollo, Guangzhou Automobile, Dongfeng Motor og andre selskaper lignende patenter, men for de forskjellige terskelinnstillingene kan de subtile forskjellene i programmet også gjøre dem forskjellige fra hverandre. For øyeblikket, som Teslas siste FSD har åpnet funksjonen for automatisk forbikjøring utenlands, innenlands ny kraft Ui Xiaoli har også lignende funksjoner blir landet, automatisk forbikjøring for L3-nivå autonom kjøring, kan ikke være nyttig, har for tiden vært på veien L3 eller hovedsakelig for å følge bilen, slik som Mercedes-Benz. Men for fremtidens L4-L5 er den automatiske forbikjøringsfunksjonen ganske viktig. Baidu "heve tiger til et problem"? Xiaomi-bilen vil være utstyrt med et Baidu høypresisjonskart Et annet patent utstedt av Xiaomi handler om å løse et vanskelig problem med stabilitet og sikkerhet innen autonom kjøring - unngå hindringer, patentet kalles "baneplanleggingsmetode, enhet, lagringsmedium , og kjøretøy".
Rutemodulen til det autonome kjøresystemet planlegger veiseksjonene som kjøretøyet må passere basert på kjøretøyets plassering, destinasjonsstedet og et kart med høy presisjon. Bevegelsesplanleggingsmodulen genererer en sikker og komfortabel kjørebane basert på informasjonsutgangen fra rutemodulen og informasjonen fra sensormodulen osv., og sender den til kjøretøykontrollmodulen. Kjøretøyets kontrollmodul styrer kjøretøyet i henhold til kjørebanen. For hindringene på veistrekningen, spesielt hindringene som beveger seg i høy hastighet, av sikkerhetsgrunner, bruker bevegelsesplanleggingsmodulen strategien med å skifte fil eller bremse ned og bremse for å planlegge kjørebanen for å unngå kollisjonen mellom kjøretøyet og hindringene . Denne måten å unngå hindringer på fører imidlertid til dårlig jevn kjøring av kjøretøy. Det vil si at det plutselig oppstår en høyhastighets unngåelse, slik at passasjerene i bilen uventet kan føre til farlige situasjoner. Tidligere nevnte vi i vår siste analyseartikkel at Xiaomi vil bruke høypresisjonskart, og i dette patentet indikerer Xiaomi direkte at den vil bruke Baidus høypresisjonskart: stiplanleggingsmetoden som brukes av selvkjørende kjøretøy er metoden gitt av Baidu's Apollo EM Motion Planner. den funksjonelle arkitekturen til Apollo inkluderer en kartmodul med høy presisjon (HD Map) for å gi kartinformasjon med høy presisjon. Lokaliseringsmodulen og persepsjonsmodulen brukes til å gi det gjeldende dynamiske miljøet rundt kjøretøyet. Prediksjonsmodulen brukes til å gi spådd fremtidig miljøinformasjon. Rutemodul for utdata av alle veistrekningene som kjøretøyet passerer på vei fra avgangspunktet til destinasjonen basert på et dedikert rutekart. Bevegelsesplanleggingsmodulen for å motta all informasjon for å generere en sikker og komfortabel bane å sende til kjøretøykontrollmodulen. Blant dem er bevegelsesplanleggingsmodulen for veihindringer, spesielt
Implementeringen av dette patentet innhenter først de historiske kjøretøydataene for krysset som tilsvarer trafikklyset som skal beregnes, bestemmer deretter kjøretøydataene til minst ett målkjøretøy basert på de historiske kjøretøydataene, og bestemmer deretter stoppemomentet og startøyeblikket for hvert målkjøretøy i krysset basert på kjøretøydataene til minst ett målkjøretøy, og bestemmer til slutt varigheten av rødt lys for trafikklyset basert på stoppøyeblikket og startøyeblikket for hvert målkjøretøy i krysset. Lengden på trafikklyset bestemmes basert på stopp- og startmomentene til hvert målkjøretøy i krysset. Sammenlignet med eksisterende teknologi, får den automatisk nedtellingslengden ved å oppdage kjøretøyets tilstand i krysset, gir nedtellingsattributter for hvert trafikklys i det dynamiske høypresisjonskartet over byen, og planlegger deretter en rimelig hastighet og rute, forbedrer nøyaktigheten av den automatiske kjøreteknologien, og forbedrer trafikkeffektiviteten og passasjerkomforten. Denne teknologien er lettere for Xiaomi, som er bosatt i Yizhuang, å verifisere implementeringen fordi Yizhuang har nesten den mest komplette kjøretøy-veisamarbeidsinfrastrukturen i Kina, med kjøretøy-veisamarbeid som mottar og sender enheter på hvert trafikklys, og Baidu's Apollo har har løpt her lenge. En etter en blir Xiaomis selvkjørende patenter intensivt godkjent og lagt ut på nettet, noe som viser at Xiaomis programvareutvikling går ganske raskt. Denne gangen er det også patenter på kjørefelt- og multikameramodulsamarbeid, som vi også vil analysere etterpå. 2022 er allerede halvveis i året, og det er fortsatt to år igjen før den nye bilen er klar for masseproduksjon, og den nylige iøynefallende ytelsen til de nye styrkene kan få Xiaomi til å øke hastigheten igjen. Denne gangen har vi tydelig sett at Xiaomi-bilen vil bruke Baidus høypresisjonskartteknologi, og Baidus


