




Wei Xiaoli har använt självkörande teknik, Xiaomi 2 år senare, sent eller inte?

Luo Yonghao meddelade att han kommer att sluta alla sociala medier från och med imorgon och starta eget företag igen. Luo Yonghao, som är känd som "industrins meditationslampa", har upprepade gånger fallit, men han har klättrat upp starkt och fortsatt att starta sin egen verksamhet, en anda värd vår beundran. Naturligtvis talar vi om en entreprenör idag, och detta är hans sista satsning i hans liv, han är Lei Jun, och Xiaomi-bilen är hans självrapporterade sista satsning i detta liv, och detta bär också förväntningarna från otaliga människor. Nyligen publicerades Xiaomi-bilen och en serie uppmärksammande patent, kombinerat med dessa patent, kan vi komma tillsammans för att se, att Xiaomi-bilen har utvecklats till vilket steg?


Från patentet kan man se, att Xiaomi bil kraft från mer än ren el?
Denna gång kretsar patentexponeringen fortfarande kring Xiaomis självutvecklade självkörande system, som börjar med "automatisk omkörningsmetod, enhet, fordon, lagringsmedium och chip". Numera är beslutsplaneringsalgoritmen kärntekniken inom ramen för autonom körteknik, där omkörningsalgoritmen är en viktig del av beslutsplaneringsalgoritmen, som styr fordonet för att slutföra automatisk omkörning genom omkörningsalgoritmen. I den relaterade tekniken bedömer körfältsförändringsalgoritmen huvudsakligen om körfältsförändring ska utföras baserat på färddata såsom hastigheten på fordonet framför och avståndet på fordonet framför och använder körfältsförändringens accelerationsökning, modell. Denna bedömningsmetod tar dock inte hänsyn till fordonstypens påverkan på körkortsbytets timing och körkortsbytets beteende, vilket gör det svårt att tillämpa samma körfältslogik på alla typer av fordon och leder till en dålig användarupplevelse vid omkörning, eller till och med misslyckande med att uppnå körkortsbyten.
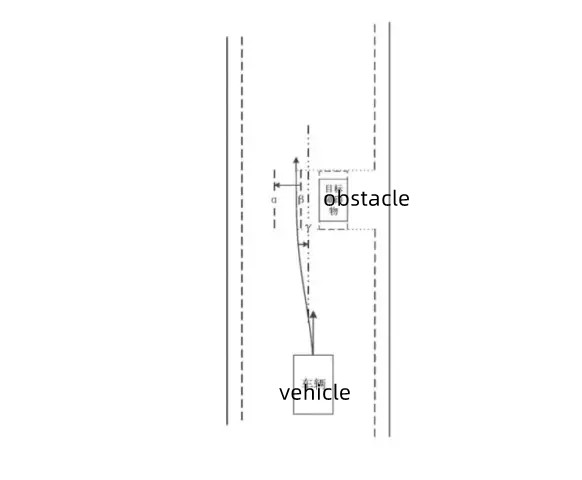

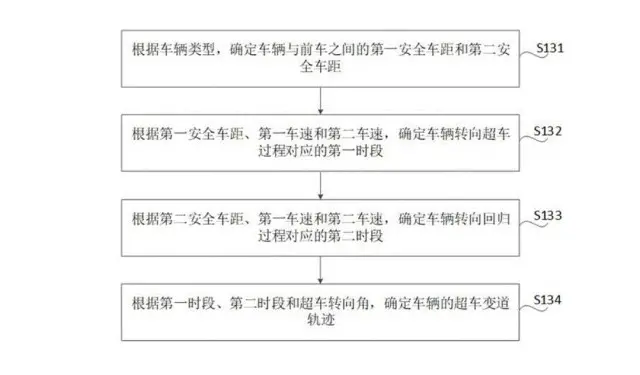
Som svar på avståndet mellan fordonet och det föregående fordonet är lägre än det förinställda avståndströskeln, bestäms fordonets fordonstyp och första fordonshastighet och fordonets omkörningsbeslut bestäms utifrån fordonets typ, första fordonshastighet, fordonets avstånd och fordonets andra fordonshastighet. och om omkörningsbeslutets resultat är lägre än den förinställda beslutsgränsen bestäms omkörningskörbanan för fordonet baserat på fordonstyp, den första fordonets hastighet, fordonets avstånd och den andra fordonets hastighet och på grundval av omkörningskörbanan styrs fordonet för omkörning. På grundval av fordonstypen och relevanta färddata avgörs det om fordonet för närvarande utför automatisk omkörning, och när det med hjälp av algoritmen bestäms att fordonet behöver utföra omkörning genereras en motsvarande körfältsbana för fordonet genom fordonstypen och relevanta färddata. så att fordonet utför automatisk omkörning baserat på denna körfältsbyggnadsbana. Med tanke på fordonstypen som en nödvändig hänsyn till algoritmen gör det möjligt för fordonet att korrekt genomföra körfältsbyggnadsprocessen baserat på den aktuella situationen, vilket ger passagerarna en bättre automatisk körupplevelse.
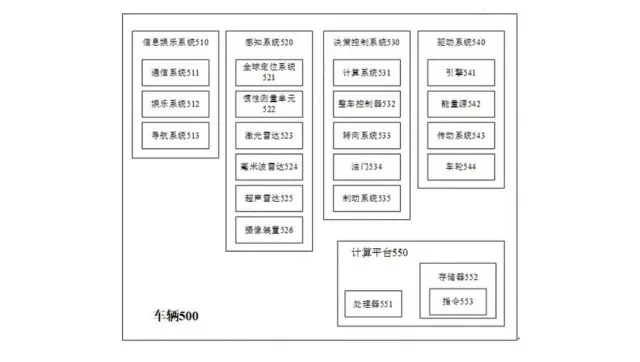
I patentet nämns fordonets självkörande sensorhårdvara än en gång, vilket är genom LIDAR, millimetervågradar, kamera och tröghetsmätenhet etc. Denna hårdvara, under samordning av algoritmen, gör det möjligt för fordonet att slutföra omkörningsåtgärden inom den förinställda tröskeln, och vi noterar också att "fordon 500" som nämns i patentet drivs av en förbränningsmotor som omvandlar bränsle Vi noterar också att "fordon 500" som anges i patentet drivs av en förbränningsmotor som omvandlar bränsle till mekanisk energi, vilket innebär att Xiaomi-bilen kan drivas av bränsle, förstärkning och ren el, men slutligen, patentet nämner att fordonet 500 kan vara en mängd olika körverktyg, såsom bilar, lastbilar, motorcyklar, bussar, båtar, flygplan, helikoptrar, fritidsfordon, tåg och så vidare.Naturligtvis är det också sant att Xiaomi Auto inte nödvändigtvis är en ren spårvagn, och en diversifierad produktstrategi har en stark roll för att förbättra varumärkets konkurrenskraft.
I själva verket har Baidu Apollo, Guangzhou Automobile, Dongfeng Motor och andra företag liknande patent, men för de olika tröskelinställningarna kan de subtila skillnaderna i programmet också göra dem olika från varandra. För närvarande, liksom Teslas senaste FSD har öppnat funktionen för automatisk omkörning utomlands, inhemsk ny kraft Ui Xiaoli har också liknande funktioner landas, automatisk omkörning för L3 nivå autonom körning, kan inte vara användbart, för närvarande har varit på väg L3 eller huvudsakligen för att följa bilen, såsom Mercedes-Benz. Men för framtiden är den automatiska omkörningsfunktionen ganska viktig.
Baidu "uppfostra tigern till ett problem"? Xiaomi bil kommer att utrustas med en Baidu hög precision karta
Ett annat patent utfärdat av Xiaomi handlar om att lösa ett svårt problem med stabilitet och säkerhet inom området autonom körning - undvika hinder, patentet kallas "vägplaneringsmetod, enhet, lagringsmedium och fordon".
Rutinmodulen i det autonoma körsystemet planerar de vägsträckor som fordonet behöver passera genom baserat på fordonets läge, destinationsplats och en karta med hög precision. Rörelseplaneringsmodulen genererar en säker och bekväm körbana baserat på informationen från routingmodulen och informationen från sensormodulen etc., och skickar den till fordonets kontrollmodul. Fordonets kontrollmodul styr fordonet enligt körbanan. För hinder på vägsträckan, särskilt hinder som rör sig i hög hastighet, av säkerhetsskäl, antar rörelseplaneringsmodulen strategin att byta körfält eller sakta ner och bromsa för att planera körbanan för att undvika kollision mellan fordonet och hindren. Detta sätt att undvika hinder leder dock till dålig smidighet i fordonets körning. Det vill säga, det kommer att bli en plötslig höghastighetsdodge, så att passagerarna i bilen oväntat kan leda till farliga situationer.
Tidigare nämnde vi i vår senaste analysartikel att Xiaomi kommer att använda högprecisionskartor, och i detta patent indikerar Xiaomi direkt att den kommer att använda Baidus högprecisionskartor: Vägplaneringsmetoden som används av självkörande fordon är den metod som tillhandahålls av Baidus Apollo EM Motion Planner. Apollo funktionella arkitektur innehåller en högprecisionskartmodul (HD Map) för att tillhandahålla högprecisionskartinformation. Lokaliseringsmodulen och perceptionsmodulen används för att ge den aktuella dynamiska miljön runt fordonet. Förutsägelsemodulen används för att tillhandahålla förutspådd framtida miljöinformation. Rutningsmodul för att visa ut alla vägsträckor som fordonet passerar på vägen från avgångspunkten till destinationen baserat på en särskild ruttkarta. Rörelseplaneringsmodulen för att ta emot all information för att generera en säker och bekväm bana att skicka till fordonskontrollmodulen.
Bland dem, rörelseplaneringsmodulen för vägshindren, särskilt höghastighetsdynamiska hinder, av säkerhetsskäl, rörelseplaneringsmodulen kommer att ta körkortsbytet körning eller sakta ner bromsstrategin för att planera körbanan för att undvika fordonskollision med hindren. Stora rörelser på grund av stora körfält eller stora rörelser på grund av snabba hastighetsförändringar på grund av retardation och bromsning kan dock få fordonet att köra mycket ostadigt. Till exempel orsakas fordonets instabila rörelse av skarp bromsning, kraftig retardation och våldsam körfältsbyggnad. Så fordonet kommer att upptäcka hindret, med en komplex funktionsoperation för att bestämma ett objekts mjuka gräns, och sedan genom fordonets egen position och efterföljande detektionsdata, efter annan funktionsoperation för att bestämma den hårda gränsen, för att planera undvikelsebanan i förväg, så att undvika hinder blir lättare, bilkörupplevelsen bättre.
Men vad vi ser, den här gången främst för mobila hinder sa inte att det är Corolla, Hennessy och Leyland, inte överassociera .... Men nu är den automatiska körningen för fast stationär hinderigenkänning inte tillräckligt, sista gången Tesla träffade planet, Azera, Xiaopeng höghastighetskrasch felbil, är potten av stationära föremål, så hoppas också att fler företag kan lösa stationär hinderundvikande igenkänning, göra mer forskning och utveckling.
Xiaomis gröna vågpassage blir smidigare?
Bland Xiaomis patent finns det en annan punkt som vi talade om i den senaste artikeln, om tekniken för fordon-väg samarbete. Inom autonom körteknik är förarlös stadsmiljö ett mycket svårt scenario att lösa. En är att på grund av de höga kostnaderna för att göra högprecisionskartor i stadsområden är noggrannheten hos de konstruerade kartorna begränsad, och även de konstruerade kartorna innehåller endast vägrelaterad information utan att ta hänsyn till mer relevanta dynamiska egenskaper för vägen. För det andra är trafiken i stadsområden komplex, och reglerna för körfält och trafikljus är varierande och komplicerade, samtidigt som det finns olika situationer som vägskugga och slitage. I detta fall kommer förståelse av den rikare informationen om vägelement att underlätta landningen av förarlösa stadsscenarier. Bland dem är det viktigaste problemet med trafikljus. Även om problemet med identifiering och detektering av trafikljus har studerats i stor utsträckning i detta skede, finns det ännu inte någon metod för att automatiskt få fram nedräkningstiden för varje trafikljus, som inte exakt kan uppskatta nedräkningsstatusen för varje trafikljus vid tätortskärningar och därmed inte kan uppfylla den högprecisionsobservation i realtid av trafikstatus. vilket hindrar etableringen av stadstrafiknätet och påverkar användarupplevelsen.
Genomförandet av detta patent erhåller först historiska fordonsdata för korsningen som motsvarar det trafikljus som ska beräknas och fastställer sedan fordonsdata för minst ett målfordon baserat på historiska fordonsdata. fastställa därefter stoppmomentet och startmomentet för varje målfordon vid skärningspunkten på grundval av fordonsdata för minst ett målfordon, och slutligen bestämmer trafikljusets varaktighet för rött ljus baserat på stoppmoment och startmoment för varje målfordon vid korsningen Trafikljusets längd bestäms utifrån stopp- och startmoment för varje målfordon vid korsningen. Jämfört med den befintliga tekniken erhåller den automatiskt nedräkningslängden genom att upptäcka fordonets tillstånd i korsningen, ger nedräkningsattribut för varje trafikljus i den dynamiska högprecisionskartan över staden och planerar sedan en rimlig hastighet och rutt, förbättrar noggrannheten hos den automatiska körtekniken, och ökar trafikeffektiviteten och passagerarkomforten. Denna teknik är lättare för Xiaomi, som är bosatt i Yizhuang, att verifiera genomförandet eftersom Yizhuang har nästan den mest kompletta fordons-väg samarbetsinfrastrukturen i Kina, med fordon-väg samarbete som tar emot och skickar enheter på varje trafikljus, och Baidus Apollo har kört här under lång tid.
En efter en godkänns Xiaomis självkörande patent intensivt och sätts online, vilket visar att Xiaomis mjukvaruutveckling är ganska snabb. Den här gången finns det också patent om filhållning och samarbete med flera kameramoduler, som vi också kommer att analysera efteråt.
2022 är redan halvvägs genom året, och det finns fortfarande två år kvar innan den nya bilen är redo för massproduktion, och den senaste iögonfallande prestandan hos de nya krafterna kan få Xiaomi att snabba upp igen. Den här gången har vi tydligt sett att Xiaomi-bilen kommer att använda Baidus högprecisionskartteknik, och Baidus egen son satt examen, också och Xiaomi bosatte sig i samma Yizhuang, två mer kraftfulla nya kraftbilstillverkande företag, kommer att vara i landet Beijing Yizhuang för att konkurrera.


